




NEDO エネルギーITSプロジェクトの事業成果を公開 |
[ ITS/CASE&MaaS ] 2013年2月27日 |
2月26(火) 公開実験及びつくば国際会議場にて開催された自動運転・隊列走行技術の実用化・普及に向けたワークショップに参加した。
NEDO(産業技術総合研究所)のエネルギーITS推進プロジェクトが今年度で完了、隊列を形成した複数のトラックを操舵制御と速度制御により安全で効率的な走行を可能にする自動運転・隊列走行等の成果をつくばセンター(茨城県つくば市)のテストコースで公開した。
1. このプロジェクトでは、2010年9月に大型トラック3台で時速80km、車間15mの隊列走行による成果を公開したが、技術を高度化させてより近距離(15m→4m)の隊列走行を実現した。 将来的に実用化が進めば15%以上の省エネルギー効果が期待。 また、技術の汎用性を向上させ隊列走行の早期実用化につなげるため、車車間通信を用いた車間距離制御と前方障害物認識技術を我が国大型車メーカ4社の大型トラックに適用し、ACC(Cooperative Adaptive Cruise Control)の実験車4台を製作した。
2.今回の具体的な要素技術
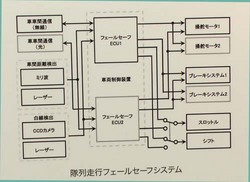
〔1〕 隊列形成(個々の車両の位置を認識して隊列を形成し管理する技術) 〔2〕 車線保持制御(道路端の白線を認識して操舵を制御する技術) 〔3〕 車間距離維持制御(車車間通信と車間距離検出によって車間距離を制御する技術) 〔4〕 障害物との衝突回避制御(障害物を検出し、レーンチェンジや非常ブレーキ制御を行う技術) 〔5〕 先頭車追尾制御(分合流部、降雪や悪天候時などの白線認識不可時に先行車を認識し追従する技術)
また、技術の汎用性を向上させ、隊列走行の早期実用化に繋げるため、車車間通信を用いた車間距離制御と前方障害物認識技術を我が国大型車メーカ4社の大型トラックに適用し、実験車4台を製作した。
NEDO(産業技術総合研究所)のエネルギーITS推進プロジェクトが今年度で完了、隊列を形成した複数のトラックを操舵制御と速度制御により安全で効率的な走行を可能にする自動運転・隊列走行等の成果をつくばセンター(茨城県つくば市)のテストコースで公開した。
1. このプロジェクトでは、2010年9月に大型トラック3台で時速80km、車間15mの隊列走行による成果を公開したが、技術を高度化させてより近距離(15m→4m)の隊列走行を実現した。 将来的に実用化が進めば15%以上の省エネルギー効果が期待。 また、技術の汎用性を向上させ隊列走行の早期実用化につなげるため、車車間通信を用いた車間距離制御と前方障害物認識技術を我が国大型車メーカ4社の大型トラックに適用し、ACC(Cooperative Adaptive Cruise Control)の実験車4台を製作した。
2.今回の具体的な要素技術
〔1〕 隊列形成(個々の車両の位置を認識して隊列を形成し管理する技術) 〔2〕 車線保持制御(道路端の白線を認識して操舵を制御する技術) 〔3〕 車間距離維持制御(車車間通信と車間距離検出によって車間距離を制御する技術) 〔4〕 障害物との衝突回避制御(障害物を検出し、レーンチェンジや非常ブレーキ制御を行う技術) 〔5〕 先頭車追尾制御(分合流部、降雪や悪天候時などの白線認識不可時に先行車を認識し追従する技術)
また、技術の汎用性を向上させ、隊列走行の早期実用化に繋げるため、車車間通信を用いた車間距離制御と前方障害物認識技術を我が国大型車メーカ4社の大型トラックに適用し、実験車4台を製作した。
 |
 |
 |
 |
 |
 |


